6環境研究
高推力密度リニアモータを用いた海洋波力発電システムの開発
- 4 質の高い教育をみんなに
- 7 エネルギーをみんなに、そしてクリーンに
- 9 産業と技術革新の基盤をつくろう
- 13 気候変動に具体的な対策を
〈工学研究科〉小山 昌人(助教)
近年,クリーンなエネルギー源として風力発電・太陽光発電といった再生可能エネルギーが急速に普及してきており,地域によってはピーク時に電力需要に対して80%以上になった事例もあります.これと同時に,風力・太陽光は天候に応じて時々刻々と発電量が変化するために電力供給の安定性が問題となっています.一方で,海洋の波による運動エネルギーを利用した「波力発電」は, 海洋波が常時発生していることなどから安定的な供給が期待されています.しかし,実用化には発電効率の向上などによる発電コストの低下が不可欠です.
波力発電には大きく分けて3つの方式があり,可動物体型・越波型・振動水中型となります.このうち,越波型・振動水中型は波の運動を風車,タービンによって受け止め,これを発電機に伝達することで発電をするものであり,基本的な構成は風力発電と似たものになります.タービンによる運動エネルギーの回収では波や風が持つエネルギーの最大約59%までしか回収できないというBetz’ lawによる上限があると知られており,この二つの方式も例外ではありません.しかし,可動物体型(Fig. 1)は浮体の運動を直接,発電機(リニアモータ)へ伝達する方式であるため,この法則は適用されず,高効率な波力発電が期待されています.そこで私たちは,独自に開発している高推力密度リニアモータであるスパイラルモータ(Fig. 2)を波力発電に応用し,より高効率な発電システムの実現を目指しています.元々はロボット用動力源として開発しているものですが,フレミングの左手則・右手則の関係が表すように,強い電磁力を出せるモータは発電機としても期待できます.
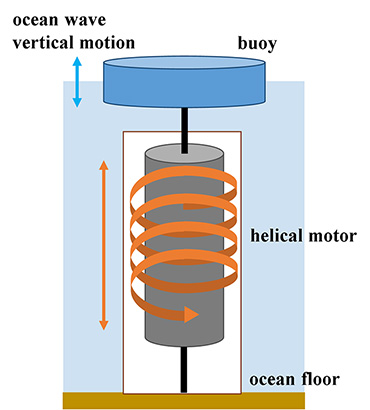
Fig. 1. Ocean power generation system with helical motor.
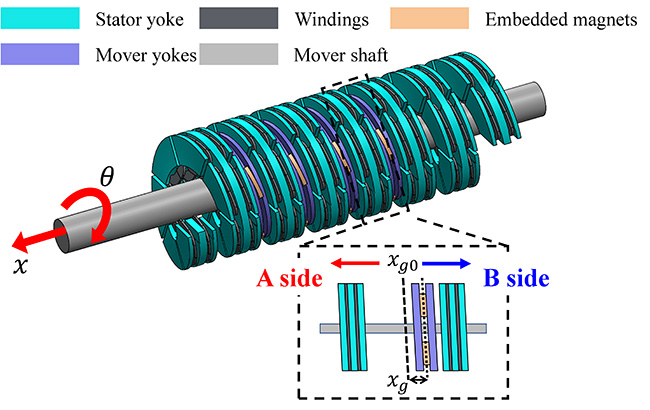
Fig. 2. Overview of the IPM helical motor.
これまでに試作したモータ実機実験を再現した数学モデルを基に,制御工学・最適化計算による発電時のモータ運動/発電制御システム(Fig. 3)の設計開発や,波力発電を想定した数値シミュレーションによる検証を行っているほか,実際に波力発電を行うために新たな試作機の製作も行っています.駆動回路の損失などを無視した理想条件下では,0.1Hzの波において90%程度の回生効率が数学モデル(微分方程式)から導出した解析解および,数値解析(Fig. 4)それぞれで得られています.また,同様の解析を同格の既存リニアモータで行った場合は60%程度という結果も得られており,最大30%程度の向上が理想条件下において見られました.今後,実機検証によってこれらの妥当性を確かめ,近い将来に実用可能な技術へ昇華させたいと考えています.
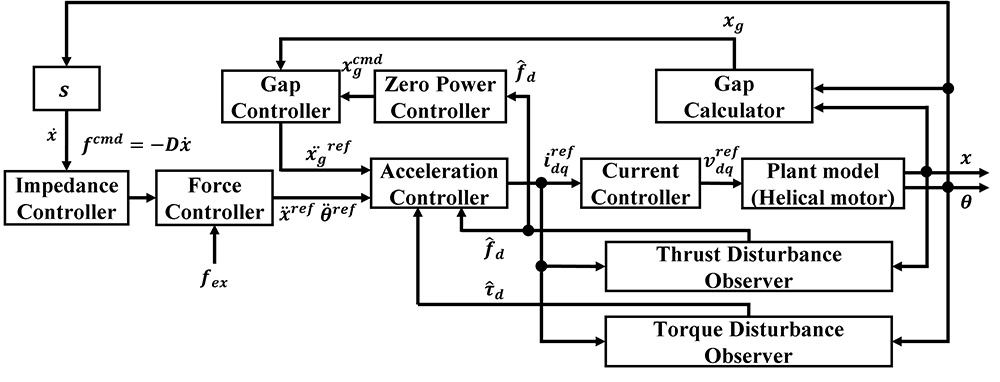
Fig. 3. Overview of the motion controller.
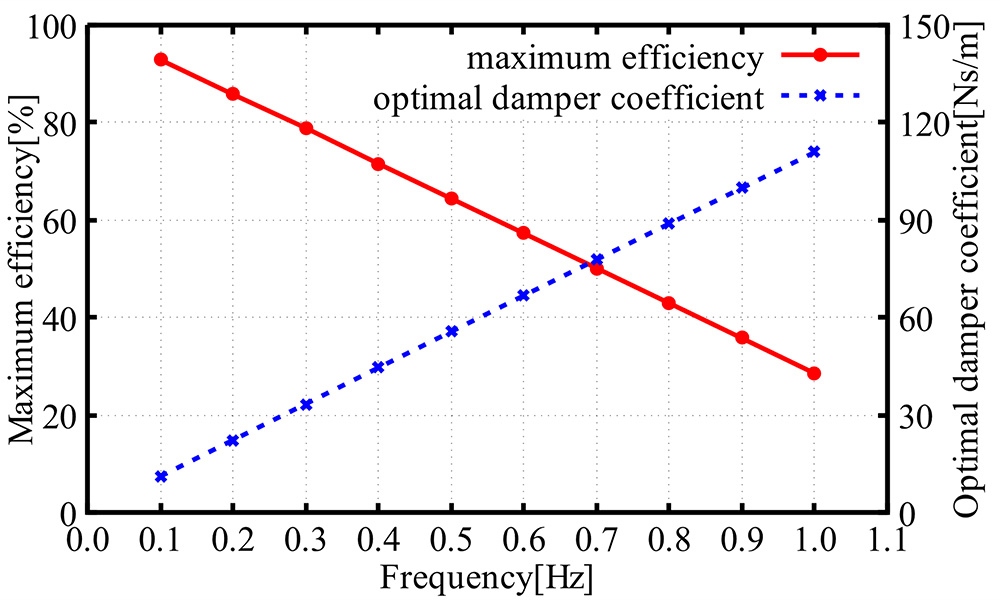
Fig. 4. Frequency vs. the maximum efficiency and the optimal damper coefficient.